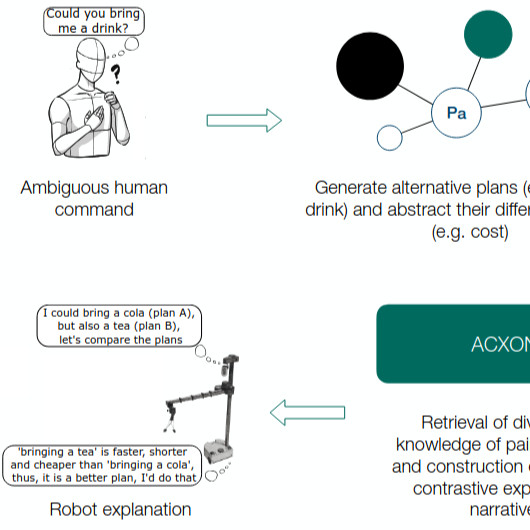
Ontological foundations for contrastive explanatory narration of robot plans
Alberto Olivares-Alarcos, Sergi Foix, Júlia Borràs, Gerard Canal, and Guillem Alenyà
Information Sciences, 741: 123280, 2026
@article{Olivares-Alarcos_IS2026,
author = "Alberto Olivares-Alarcos and Sergi Foix and Júlia Borràs and Gerard Canal and Guillem Alenyà",
title = "{Ontological foundations for contrastive explanatory narration of robot plans}",
journal = "Information Sciences",
volume = "741",
pages = "123280",
year = "2026",
issn = "0020-0255",
url = "https://www.sciencedirect.com/science/article/pii/S0020025526002112",
doi = "10.1016/j.ins.2026.123280"
}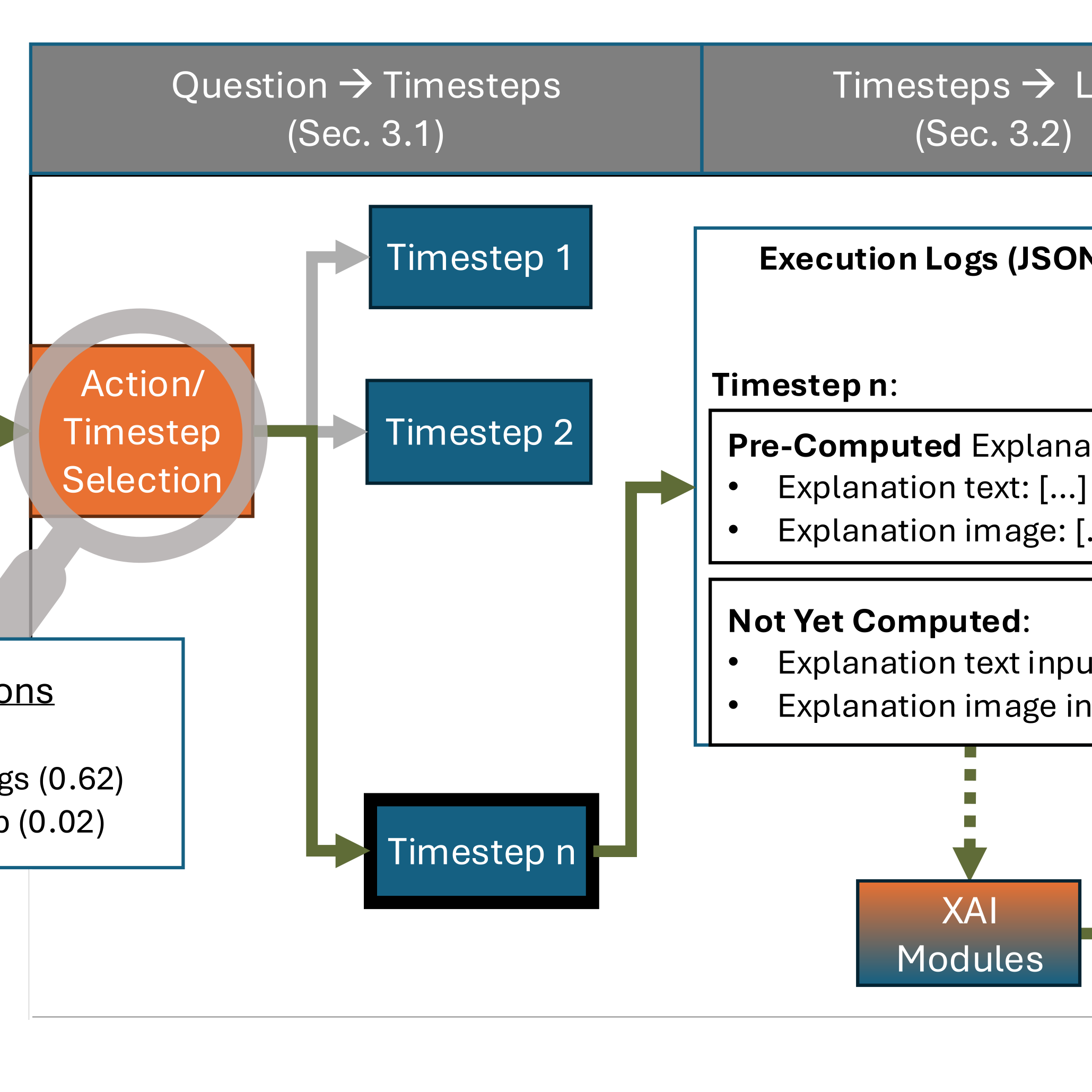
Neurosymbolic Explanation Selection in Robotics: Combining the Strengths of Planning and Foundation Models for XAI
Lennart Wachowiak, Andrew Coles, Oya Celiktutan, and Gerard Canal
Companion Proceedings of the 21st ACM/IEEE International Conference on Human-Robot Interaction, pp. 222–227, 2026
@inproceedings{wachowiak_hrilbr26,
author = "Lennart Wachowiak and Andrew Coles and Oya Celiktutan and Gerard Canal",
title = "{Neurosymbolic Explanation Selection in Robotics: Combining the Strengths of Planning and Foundation Models for XAI}",
booktitle = "Companion Proceedings of the 21st ACM/IEEE International Conference on Human-Robot Interaction",
pages = "222–227",
year = "2026",
publisher = "Association for Computing Machinery",
location = "Edinburgh, Scotland, UK",
series = "HRI Companion '26",
doi = "10.1145/3776734.3794387"
}
Predicting When and What to Explain from Multimodal Eye Tracking and Task Signals
Lennart Wachowiak, Peter Tisnikar, Gerard Canal, Andrew Coles, Matteo Leonetti, and Oya Celiktutan
IEEE Transactions on Affective Computing, 16(1): 179-190, 2025
Published online in 2024
@article{Wachowiak_TAC2024,
author = "Lennart Wachowiak and Peter Tisnikar and Gerard Canal and Andrew Coles and Matteo Leonetti and Oya Celiktutan",
title = "{Predicting When and What to Explain from Multimodal Eye Tracking and Task Signals}",
journal = "IEEE Transactions on Affective Computing",
year = "2025",
volume = "16",
number = "1",
pages = "179-190",
doi = "10.1109/TAFFC.2024.3419696"
}
Towards Inclusive Robot Competitions
Zoe Evans, Muhammad Abdul Basit Malik, Matteo Leonetti, Gerard Canal, and Martim Brandao
4th Diversity, Equity, & Inclusion in HRI Workshop at HRI'25, 2025
@inproceedings{Evans_hriws2025,
author = "Zoe Evans and Muhammad Abdul Basit Malik and Matteo Leonetti and Gerard Canal and Martim Brandao",
title = "{Towards Inclusive Robot Competitions}",
booktitle = "4th Diversity, Equity, \& Inclusion in HRI Workshop at HRI'25",
year = "2025"
}
A Taxonomy of Explanation Types and Need Indicators in Human–Agent Collaborations
Lennart Wachowiak, Andrew Coles, Gerard Canal, and Oya Celiktutan
International Journal of Social Robotics, 16(7): 1681–1692, 2024
@article{Wachowiak_IJSR2024,
author = "Lennart Wachowiak and Andrew Coles and Gerard Canal and Oya Celiktutan",
title = "{A Taxonomy of Explanation Types and Need Indicators in Human–Agent Collaborations}",
journal = "{International Journal of Social Robotics}",
year = "2024",
issn = "1875-4805",
doi = "10.1007/s12369-024-01148-8",
publisher = "Springer",
pages = "1681–1692",
volume = "16",
number = "7"
}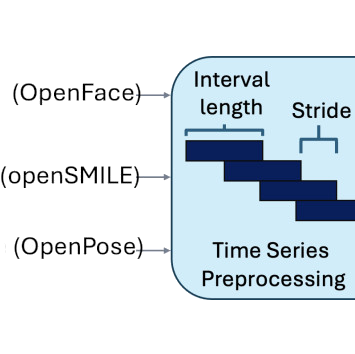
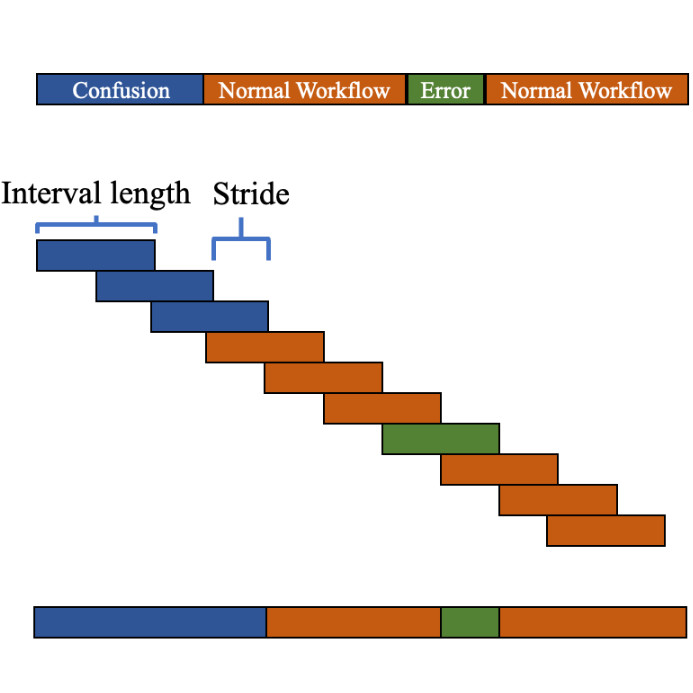
A Time Series Classification Pipeline for Detecting Interaction Ruptures in HRI Based on User Reactions
Lennart Wachowiak, Peter Tisnikar, Andrew Coles, Gerard Canal, and Oya Celiktutan
Proceedings of the 26th International Conference on Multimodal Interaction (ICMI ‘24), pp. 657-665, 2024
@inproceedings{Wachowiak_icmi2024,
author = "Lennart Wachowiak and Peter Tisnikar and Andrew Coles and Gerard Canal and Oya Celiktutan",
title = "{A Time Series Classification Pipeline for Detecting Interaction Ruptures in HRI Based on User Reactions}",
year = "2024",
month = "Nov",
pages = "657-665",
booktitle = "Proceedings of the 26th International Conference on Multimodal Interaction (ICMI '24)",
isbn = "9798400704628",
publisher = "Association for Computing Machinery",
doi = "10.1145/3678957.3688386"
}
Planning for Human-Robot Collaboration Scenarios with Heterogeneous Costs and Durations
Silvia Izquierdo-Badiola, Gerard Canal, Guillem Alenyà, Carlos Rizzo, and Andrew Coles
ECAI 2024, pp. 4410-4417, 2024
@inproceedings{Izquierdo-Badiola_ecai2024,
author = "Silvia Izquierdo-Badiola and Gerard Canal and Guillem Alenyà and Carlos Rizzo and Andrew Coles",
title = "{Planning for Human-Robot Collaboration Scenarios with Heterogeneous Costs and Durations}",
booktitle = "ECAI 2024",
year = "2024",
month = "10",
doi = "10.3233/FAIA241019",
pages = "4410-4417"
}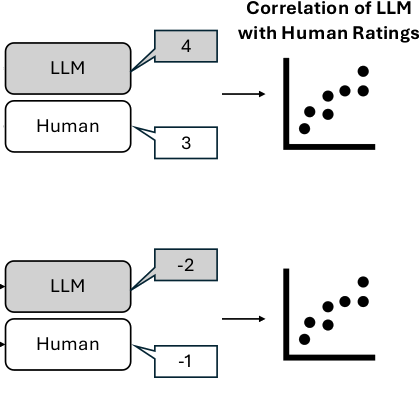
Are Large Language Models Aligned with People’s Social Intuitions for Human-Robot Interactions?
Lennart Wachowiak, Andrew Coles, Oya Celiktutan, and Gerard Canal
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2520-2527, 2024
@inproceedings{Wachowiak_iros2024,
author = "Lennart Wachowiak and Andrew Coles and Oya Celiktutan and Gerard Canal",
title = "{Are Large Language Models Aligned with People's Social Intuitions for Human-Robot Interactions?}",
booktitle = "2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2024",
month = "10",
doi = "10.1109/IROS58592.2024.10801325",
pages = "2520-2527"
}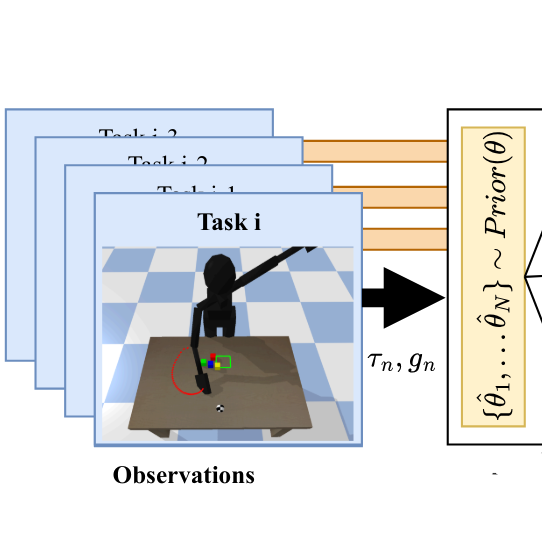
Probabilistic Inference of Human Capabilities from Passive Observations
Peter Tisnikar, Gerard Canal, and Matteo Leonetti
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8779-8785, 2024
@inproceedings{Tisnikar_iros2024,
author = "Peter Tisnikar and Gerard Canal and Matteo Leonetti",
title = "{Probabilistic Inference of Human Capabilities from Passive Observations}",
booktitle = "2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2024",
month = "10",
pages = "8779-8785",
doi = "10.1109/IROS58592.2024.10801640"
}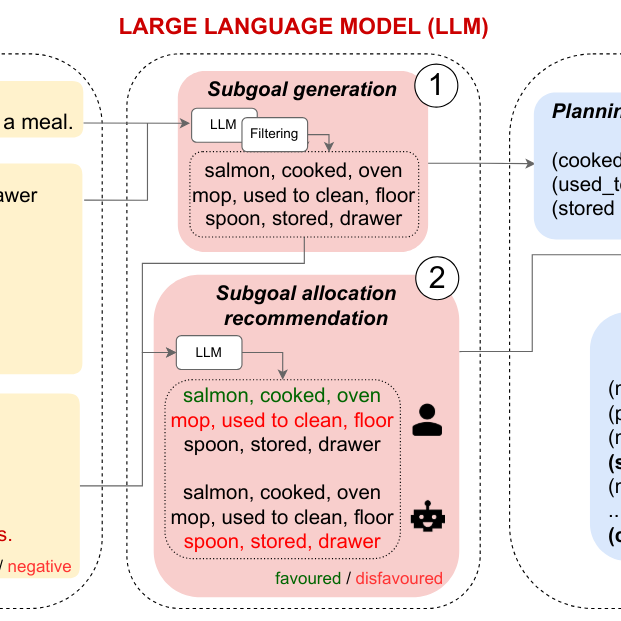
PlanCollabNL: Leveraging Large Language Models for Adaptive Plan Generation in Human-Robot Collaboration
Silvia Izquierdo-Badiola, Gerard Canal, Carlos Rizzo, and Guillem Alenyà
IEEE International Conference on Robotics and Automation (ICRA), pp. 17344-17350, 2024
@inproceedings{Izquierdo-Badiola_icra2024,
author = "Silvia Izquierdo-Badiola and Gerard Canal and Carlos Rizzo and Guillem Alenyà",
title = "{PlanCollabNL: Leveraging Large Language Models for Adaptive Plan Generation in Human-Robot Collaboration}",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2024",
ISSN = "2577-087X",
month = "5",
pages = "17344--17350",
doi = "10.1109/ICRA57147.2024.10610055"
}
When Do People Want an Explanation from a Robot?
Lennart Wachowiak, Andrew Fenn, Haris Kamran, Andrew Coles, Oya Celiktutan, and Gerard Canal
Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pp. 752–761, 2024
@inproceedings{Wachowiak_hri2024,
author = "Lennart Wachowiak and Andrew Fenn and Haris Kamran and Andrew Coles and Oya Celiktutan and Gerard Canal",
title = "{When Do People Want an Explanation from a Robot?}",
year = "2024",
isbn = "979-8-4007-0322-5",
publisher = "Association for Computing Machinery",
address = "New York, NY, USA",
doi = "10.1145/3610977.3634990",
booktitle = "Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction",
pages = "752–761",
numpages = "10",
keywords = "error mitigation, explainability, hri, human-agent interaction, user study, user-centered ai, xai",
location = "Boulder, CO, USA,",
series = "HRI '24"
}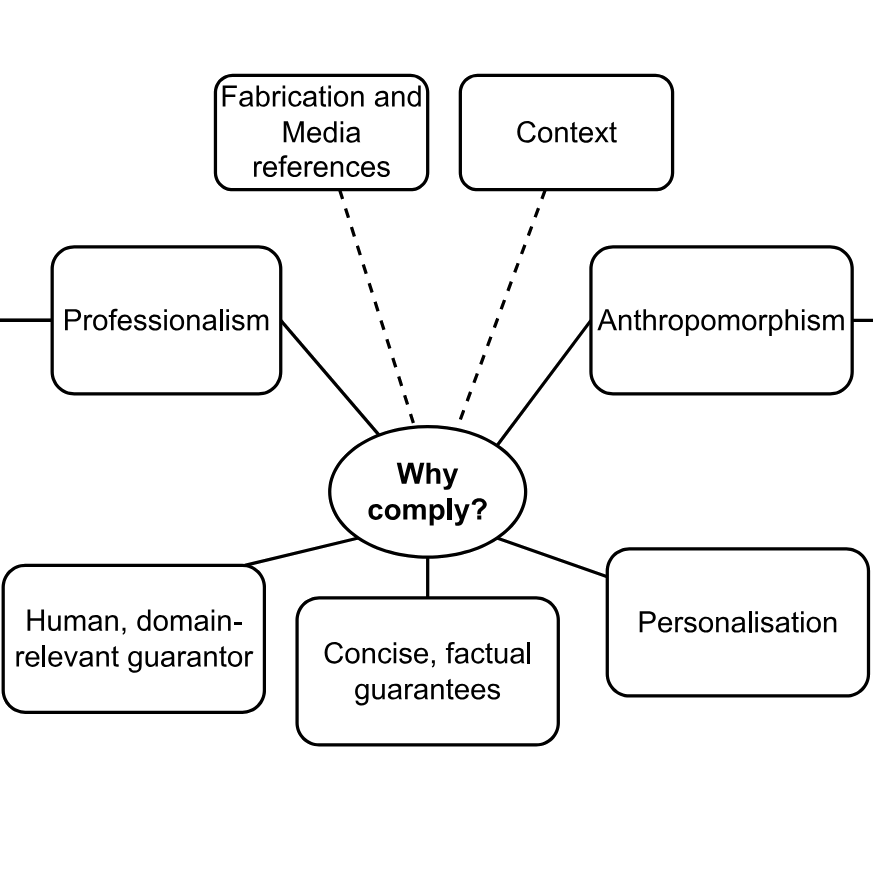
More Than Trust: Compliance in Instantaneous Human-robot Interactions
Sachini Weerawardhana, Michael E. Akintunde, Peta Masters, Aaron Roberts, Genovefa Kefalidou, Yang Lu, Gerard Canal, Nicole Lehchevska, Elisabeth Halvorsen, Wei Wei, and Luc Moreau
IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 1556-1563, 2024
@inproceedings{Weerawardhana_roman2024,
author = "Sachini Weerawardhana and Michael E. Akintunde and Peta Masters and Aaron Roberts and Genovefa Kefalidou and Yang Lu and Gerard Canal and Nicole Lehchevska and Elisabeth Halvorsen and Wei Wei and Luc Moreau",
title = "{More Than Trust: Compliance in Instantaneous Human-robot Interactions}",
booktitle = "IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)",
year = "2024",
doi = "10.1109/RO-MAN60168.2024.10731378",
pages = "1556-1563"
}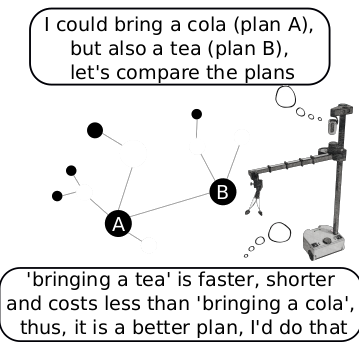
Ontological modeling and reasoning for comparison and contrastive narration of robot plans
Alberto Olivares-Alarcos, Sergi Foix, Júlia Borràs, Gerard Canal, and Guillem Alenyà
Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems (AAMAS), pp. 2405–2407, 2024
@inproceedings{Olivares-Alarcos_aamas2024,
author = "Alberto Olivares-Alarcos and Sergi Foix and J{\'u}lia Borr{\`a}s and Gerard Canal and Guillem Aleny{\`a}",
title = "{Ontological modeling and reasoning for comparison and contrastive narration of robot plans}",
year = "2024",
pages = "2405–2407",
numpages = "3",
isbn = "9798400704864",
publisher = "International Foundation for Autonomous Agents and Multiagent Systems",
booktitle = "Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems (AAMAS)",
series = "AAMAS '24",
url = "https://dl.acm.org/doi/10.5555/3635637.3663175"
}
Towards Probabilistic Planning of Explanations for Robot Navigation
Amar Halilovic, Senka Krivić, and Gerard Canal
RSS 2024 Workshop on Unsolved Problems in Social Robot Navigation, 2024
@inproceedings{Halilovic_usn2024,
author = "Amar Halilovic and Senka Krivić and Gerard Canal",
title = "{Towards Probabilistic Planning of Explanations for Robot Navigation}",
booktitle = "RSS 2024 Workshop on Unsolved Problems in Social Robot Navigation",
year = "2024"
}
Generating predicate suggestions based on the space of plans: an example of planning with preferences
Gerard Canal, Carme Torras, and Guillem Alenyà
User Modeling and User-Adapted Interaction, 33(2): 333–357, 2023
Published online in 2022
@article{Canal_UMUAI2022,
author = "Gerard Canal and Carme Torras and Guillem Alenyà",
title = "{Generating predicate suggestions based on the space of plans: an example of planning with preferences}",
journal = "User Modeling and User-Adapted Interaction",
publisher = "Springer Nature",
year = "2023",
number = "2",
volume = "33",
pages = "333–357",
doi = "10.1007/s11257-022-09327-w"
}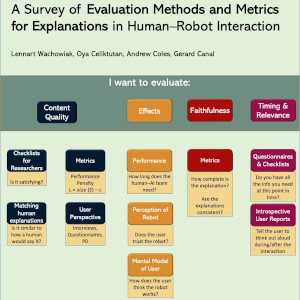
A Survey of Evaluation Methods and Metrics for Explanations in Human–Robot Interaction (HRI)
Lennart Wachowiak, Oya Celiktutan, Andrew Coles, and Gerard Canal
Explainable Robotics Workshop at IEEE International Conference on Robotics and Automation (ICRA), 2023
@inproceedings{Wachowiak_xro2023,
author = "Lennart Wachowiak and Oya Celiktutan and Andrew Coles and Gerard Canal",
title = "{A Survey of Evaluation Methods and Metrics for Explanations in Human–Robot Interaction (HRI)}",
year = "2023",
booktitle = "Explainable Robotics Workshop at IEEE International Conference on Robotics and Automation (ICRA)",
url = "https://openreview.net/forum?id=f2VocjxnCKR"
}
Analysing Eye Gaze Patterns During Confusion and Errors in Human–Agent Collaborations
Lennart Wachowiak, Peter Tisnikar, Gerard Canal, Andrew Coles, Matteo Leonetti, and Oya Celiktutan
31st IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2022
@inproceedings{Wachowiak_roman2022,
author = "Lennart Wachowiak and Peter Tisnikar and Gerard Canal and Andrew Coles and Matteo Leonetti and Oya Celiktutan",
title = "{Analysing Eye Gaze Patterns During Confusion and Errors in Human–Agent Collaborations}",
booktitle = "31st IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)",
year = "2022",
doi = "10.1109/RO-MAN53752.2022.9900589"
}
Improved Task Planning through Failure Anticipation in Human-Robot Collaboration
Silvia Izquierdo-Badiola, Gerard Canal, Carlos Rizzo, and Guillem Alenyà
IEEE International Conference on Robotics and Automation (ICRA), pp. 7875-7880, 2022
@inproceedings{Izquierdo-Badiola_icra2022,
author = "Silvia Izquierdo-Badiola and Gerard Canal and Carlos Rizzo and Guillem Alenyà",
title = "{Improved Task Planning through Failure Anticipation in Human-Robot Collaboration}",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2022",
ISSN = "2577-087X",
month = "5",
pages = "7875-7880",
doi = "10.1109/ICRA46639.2022.9812236"
}
PlanVerb: Domain-Independent Verbalization and Summary of Task Plans
Gerard Canal, Senka Krivić, Paul Luff, and Andrew Coles
Proceedings of the AAAI Conference on Artificial Intelligence, 36(9), pp. 9698-9706, 2022
@inproceedings{Canal_AAAI2022,
author = "Gerard Canal and Senka Krivić and Paul Luff and Andrew Coles",
title = "{PlanVerb: Domain-Independent Verbalization and Summary of Task Plans}",
booktitle = "Proceedings of the AAAI Conference on Artificial Intelligence",
volume = "36(9)",
pages = "9698-9706",
year = "2022",
month = "6",
doi = "10.1609/aaai.v36i9.21204"
}
Actor-Focused Interactive Visualization for AI Planning
Gabriel Dias Cantareira, Gerard Canal, and Rita Borgo
Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS), 32, pp. 678-686, 2022
@inproceedings{Cantareira_icaps2022,
author = "Gabriel Dias Cantareira and Gerard Canal and Rita Borgo",
title = "{Actor-Focused Interactive Visualization for AI Planning}",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
volume = "32",
pages = "678-686",
year = "2022",
month = "6",
doi = "10.1609/icaps.v32i1.19857"
}
Towards Automatic State Recovery for Replanning
Stefan-Octavian Bezrucav, Gerard Canal, Andrew Coles, Michael Cashmore, and Burkhard Corves
ICAPS 2022 Workshop on Integrated Planning, Acting, and Execution (IntEx), 2022
@inproceedings{Bezrucav_intex2022,
author = "Stefan-Octavian Bezrucav and Gerard Canal and Andrew Coles and Michael Cashmore and Burkhard Corves",
title = "{Towards Automatic State Recovery for Replanning}",
booktitle = "ICAPS 2022 Workshop on Integrated Planning, Acting, and Execution (IntEx)",
year = "2022"
}
Towards Autonomous Collaborative Robots that Adapt and Explain
Peter Tisnikar, Lennart Wachowiak, Gerard Canal, Andrew Coles, Matteo Leonetti, and Oya Celiktutan
ICRA 2022 Workshop on Prediction and Anticipation Reasoning in Human Robot Interaction, 2022
@inproceedings{Tisnikar_parhri2022,
author = "Peter Tisnikar and Lennart Wachowiak and Gerard Canal and Andrew Coles and Matteo Leonetti and Oya Celiktutan",
title = "{Towards Autonomous Collaborative Robots that Adapt and Explain}",
booktitle = "ICRA 2022 Workshop on Prediction and Anticipation Reasoning in Human Robot Interaction",
year = "2022"
}
Are Preferences Useful for Better Assistance?: A Physically Assistive Robotics User Study
Gerard Canal, Carme Torras, and Guillem Alenyà
ACM Transactions on Human-Robot Interaction (THRI), 10(4): 1-19, 2021
@article{Canal_THRI2021,
author = "Gerard Canal and Carme Torras and Guillem Aleny{\`a}",
title = "{Are Preferences Useful for Better Assistance?: A Physically Assistive Robotics User Study}",
journal = "ACM Transactions on Human-Robot Interaction (THRI)",
year = "2021",
doi = "10.1145/3472208",
volume = "10",
number = "4",
pages = "1--19",
articleno = "39"
}
Towards providing explanations for robot motion planning
Martim Brandão, Gerard Canal, Senka Krivić, and Daniele Magazzeni
IEEE International Conference on Robotics and Automation (ICRA), pp. 3927-3933, 2021
@inproceedings{Brandao_icra2021,
author = "Martim Brandão and Gerard Canal and Senka Krivić and Daniele Magazzeni",
title = "{Towards providing explanations for robot motion planning}",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2021",
doi = "10.1109/ICRA48506.2021.9562003",
ISSN = "2577-087X",
pages = "3927-3933",
month = "5"
}
Using Plan Libraries for Improved Plan Execution
Ionut Moraru, Gerard Canal, and Simon Parsons
UKRAS21 Conference: “Robotics at home” Proceedings, pp. 51-52, 2021
@inproceedings{Moraru_ukras2021,
author = "Ionut Moraru and Gerard Canal and Simon Parsons",
title = "{Using Plan Libraries for Improved Plan Execution}",
year = "2021",
booktitle = "UKRAS21 Conference: ``Robotics at home'' Proceedings",
pages = "51--52",
url = "https://uk-ras.org.uk/publications/ukras21-conference-proceedings\#:\textasciitilde :text=INCLUDING\%20HUMAN\%20FACTORS-,USING\%20PLAN\%20LIBRARIES\%20FOR\%20IMPROVED\%20PLAN\%20EXECUTION,-Authors\%3A"
}
How experts explain motion planner output: a preliminary user-study to inform the design of explainable planners
Martim Brandão, Gerard Canal, Senka Krivić, Paul Luff, and Amanda Coles
IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 299-306, 2021
@inproceedings{Brandao_roman2021,
author = "Martim Brandão and Gerard Canal and Senka Krivić and Paul Luff and Amanda Coles",
title = "{How experts explain motion planner output: a preliminary user-study to inform the design of explainable planners}",
booktitle = "IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)",
year = "2021",
doi = "10.1109/RO-MAN50785.2021.9515407",
ISSN = "1944-9437",
pages = "299-306",
month = "8"
}
Task-Aware Waypoint Sampling for Robotic Planning
Sarah Keren, Gerard Canal, and Michael Cashmore
Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS), 31, pp. 643-651, 2021
@inproceedings{Keren_icaps2021,
author = "Sarah Keren and Gerard Canal and Michael Cashmore",
title = "{Task-Aware Waypoint Sampling for Robotic Planning}",
booktitle = "Proceedings of the International Conference on Automated Planning and Scheduling (ICAPS)",
volume = "31",
year = "2021",
month = "5",
pages = "643-651",
doi = "10.1609/icaps.v31i1.16013"
}
Task Plan verbalizations with causal justifications
Gerard Canal, Senka Krivić, Paul Luff, and Andrew Coles
ICAPS 2021 Workshop on Explainable AI Planning (XAIP), 2021
@inproceedings{Canal_xaip2021,
author = "Gerard Canal and Senka Krivić and Paul Luff and Andrew Coles",
title = "{Task Plan verbalizations with causal justifications}",
booktitle = "ICAPS 2021 Workshop on Explainable AI Planning (XAIP)",
year = "2021",
url = "https://openreview.net/forum?id=4T9oO\_MrhEm"
}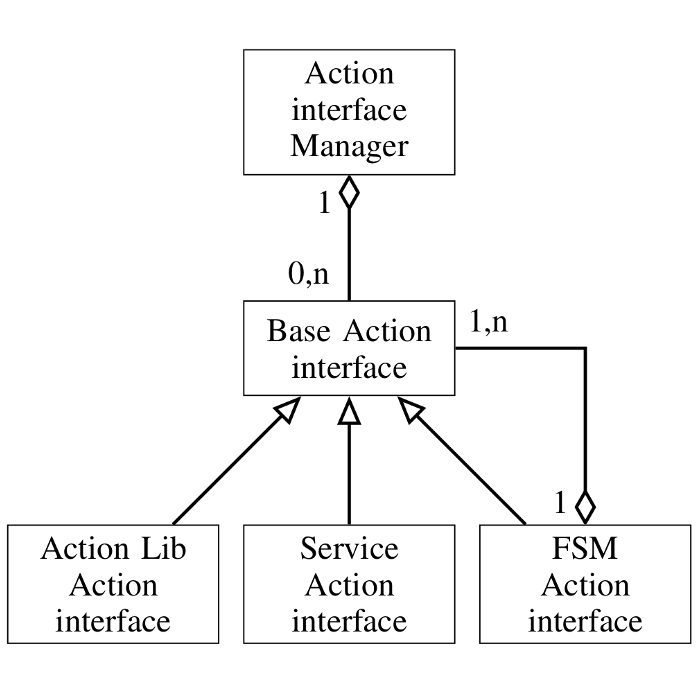
An Action Interface Manager for ROSPlan
Stefan-Octavian Bezrucav, Gerard Canal, Michael Cashmore, and Burkhard Corves
Proceedings of the 9th ICAPS Workshop on Planning and Robotics (PlanRob), pp. 1-9, 2021
@inproceedings{Bezrucav_planrob2021,
author = "Stefan-Octavian Bezrucav and Gerard Canal and Michael Cashmore and Burkhard Corves",
title = "{An Action Interface Manager for ROSPlan}",
booktitle = "Proceedings of the 9th ICAPS Workshop on Planning and Robotics (PlanRob)",
pages = "1--9",
year = "2021"
}
Designing an Adaptable Benchmark and Competition Simulation for Integrated Planning and Execution
Liudvikas Nemiro, Gerard Canal, Oscar Lima, Michael Cashmore, and Mark Roberts
Proceedings of the Workshop on the International Planning Competition (WIPC), pp. 1-5, 2021
@inproceedings{Nemiro_wipc2021,
author = "Liudvikas Nemiro and Gerard Canal and Oscar Lima and Michael Cashmore and Mark Roberts",
title = "{Designing an Adaptable Benchmark and Competition Simulation for Integrated Planning and Execution}",
booktitle = "Proceedings of the Workshop on the International Planning Competition (WIPC)",
pages = "1--5",
year = "2021"
}
Building Trust in Human-Machine Partnerships
Gerard Canal, Rita Borgo, Andrew Coles, Archie Drake, Dong Huynh, Perry Keller, Senka Krivić, Paul Luff, Quratul-ain Mahesar, Luc Moreau, Simon Parsons, Menisha Patel, and Elizabeth I. Sklar
Computer Law & Security Review: The International Journal of Technology Law and Practice, 39, 2020
@article{Canal_CLSR2020,
author = "Gerard Canal and Rita Borgo and Andrew Coles and Archie Drake and Dong Huynh and Perry Keller and Senka Krivić and Paul Luff and Quratul-ain Mahesar and Luc Moreau and Simon Parsons and Menisha Patel and Elizabeth I. Sklar",
title = "{Building Trust in Human-Machine Partnerships}",
journal = "Computer Law \& Security Review: The International Journal of Technology Law and Practice",
year = "2020",
month = "11",
volume = "39",
issn = "0267-3649",
doi = "10.1016/j.clsr.2020.105489"
}
Task-Aware Waypoint Sampling for Planning Robots
Sarah Keren, Gerard Canal, and Michael Cashmore
ICAPS Workshop on Planning and Robotics (PlanRob), 2020
@inproceedings{Keren_PlanRob2020,
author = "Sarah Keren and Gerard Canal and Michael Cashmore",
title = "{Task-Aware Waypoint Sampling for Planning Robots}",
booktitle = "ICAPS Workshop on Planning and Robotics (PlanRob)",
year = "2020",
month = "10"
}
Adapting robot behavior to user preferences in assistive scenarios
Gerard Canal
PhD Thesis, Universitat Politècnica de Catalunya · BarcelonaTech (UPC), 2020
2020 ACIA Marc Esteva Vivanco prize to the best AI PhD Thesis
@phdthesis{gcanal_phdthesis,
author = "Gerard Canal",
title = "{Adapting robot behavior to user preferences in assistive scenarios}",
school = "Universitat Politècnica de Catalunya · BarcelonaTech (UPC)",
year = "2020",
month = "3",
doi = "10.5821/dissertation-2117-330728"
}
Adapting robot task planning to user preferences: an assistive shoe dressing example
Gerard Canal, Guillem Alenyà, and Carme Torras
Autonomous Robots, 43(6): 1343-1356, 2019
Published online in 2018
@article{Canal_AURO2019,
author = "Gerard Canal and Guillem Aleny{\`a} and Carme Torras",
title = "{Adapting robot task planning to user preferences: an assistive shoe dressing example}",
journal = "Autonomous Robots",
year = "2019",
month = "8",
day = "01",
volume = "43",
number = "6",
pages = "1343--1356",
issn = "1573-7527",
doi = "10.1007/s10514-018-9737-2"
}
Probabilistic Planning for Robotics with ROSPlan
Gerard Canal, Michael Cashmore, Senka Krivić, Guillem Alenyà, Daniele Magazzeni, and Carme Torras
Towards Autonomous Robotic Systems, pp. 236-250, 2019
2nd Place ARQ Best Paper Award and Nominated to Best Student Paper
@inproceedings{Canal_taros2019,
author = "Gerard Canal and Michael Cashmore and Senka Krivi{\'c} and Guillem Aleny{\`a} and Daniele Magazzeni and Carme Torras",
title = "{Probabilistic Planning for Robotics with ROSPlan}",
booktitle = "Towards Autonomous Robotic Systems",
year = "2019",
publisher = "Springer International Publishing",
pages = "236--250",
isbn = "978-3-030-23807-0",
doi = "10.1007/978-3-030-23807-0\_20"
}
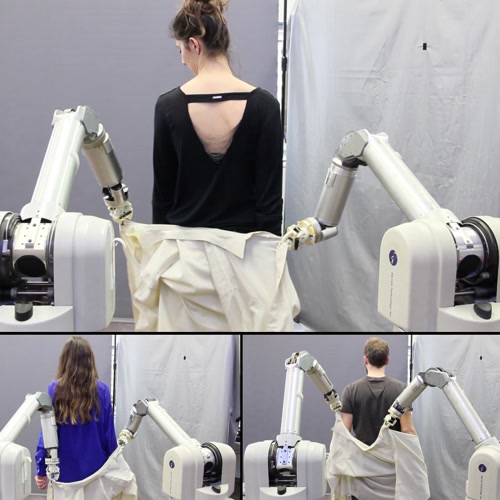
Joining high-level symbolic planning with low-level motion primitives in adaptive HRI: application to dressing assistance
Gerard Canal, Emmanuel Pignat, Guillem Alenyà, Sylvain Calinon, and Carme Torras
IEEE International Conference on Robotics and Automation (ICRA), pp. 3273-3278, 2018
@inproceedings{Canal_icra2018,
author = "Gerard Canal and Emmanuel Pignat and Guillem Aleny{\`a} and Sylvain Calinon and Carme Torras",
title = "{Joining high-level symbolic planning with low-level motion primitives in adaptive HRI: application to dressing assistance}",
booktitle = "IEEE International Conference on Robotics and Automation (ICRA)",
year = "2018",
doi = "10.1109/ICRA.2018.8460606",
ISSN = "2577-087X",
pages = "3273--3278",
month = "5"
}
Towards safety in Physically Assistive Robots: eating assistance
Maria Vila, Gerard Canal, and Guillem Alenyà
Robots for Assisted Living Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
@inproceedings{Vila_irosws2018,
author = "Maria Vila and Gerard Canal and Guillem Aleny{\`a}",
title = "{Towards safety in Physically Assistive Robots: eating assistance}",
booktitle = "Robots for Assisted Living Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)",
year = "2018",
month = "10"
}
A taxonomy of preferences for physically assistive robots
Gerard Canal, Guillem Alenyà, and Carme Torras
IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp. 292-297, 2017
@inproceedings{Canal_roman2017,
author = "Gerard Canal and Guillem Aleny{\`a} and Carme Torras",
title = "{A taxonomy of preferences for physically assistive robots}",
booktitle = "IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)",
year = "2017",
doi = "10.1109/ROMAN.2017.8172316",
pages = "292--297",
ISSN = "1944-9437",
month = "8"
}
A real-time Human-Robot Interaction system based on gestures for assistive scenarios
Gerard Canal, Sergio Escalera, and Cecilio Angulo
Computer Vision and Image Understanding, 149: 65-77, 2016
@article{Canal_CVIU2016,
author = "Gerard Canal and Sergio Escalera and Cecilio Angulo",
title = "{A real-time Human-Robot Interaction system based on gestures for assistive scenarios}",
journal = "Computer Vision and Image Understanding",
volume = "149",
pages = "65--77",
year = "2016",
doi = "10.1016/j.cviu.2016.03.004",
note = "Special issue on Assistive Computer Vision and Robotics - ``Assistive Solutions for Mobility, Communication and HMI''",
issn = "1077-3142",
url = "https://www.sciencedirect.com/science/article/pii/S107731421600076X"
}
Personalization Framework for Adaptive Robotic Feeding Assistance
Gerard Canal, Guillem Alenyà, and Carme Torras
International Conference on Social Robotics (ICSR), pp. 22-31, 2016
@inproceedings{Canal_icsr2016,
author = "Gerard Canal and Guillem Aleny{\`a} and Carme Torras",
title = "{Personalization Framework for Adaptive Robotic Feeding Assistance}",
booktitle = "International Conference on Social Robotics (ICSR)",
year = "2016",
doi = "10.1007/978-3-319-47437-3\_3",
publisher = "Springer International Publishing",
pages = "22--31",
isbn = "978-3-319-47437-3",
month = "11"
}
Gesture based Human Multi-Robot Interaction
Gerard Canal, Cecilio Angulo, and Sergio Escalera
International Joint Conference on Neural Networks (IJCNN), pp. 1795-1802, 2015
@inproceedings{Canal_ijcnn2015,
author = "Gerard Canal and Cecilio Angulo and Sergio Escalera",
title = "{Gesture based Human Multi-Robot Interaction}",
booktitle = "International Joint Conference on Neural Networks (IJCNN)",
year = "2015",
pages = "1795--1802",
doi = "10.1109/IJCNN.2015.7280540",
ISSN = "2161-4393",
month = "7"
}